Ultra-Long-Range Detection
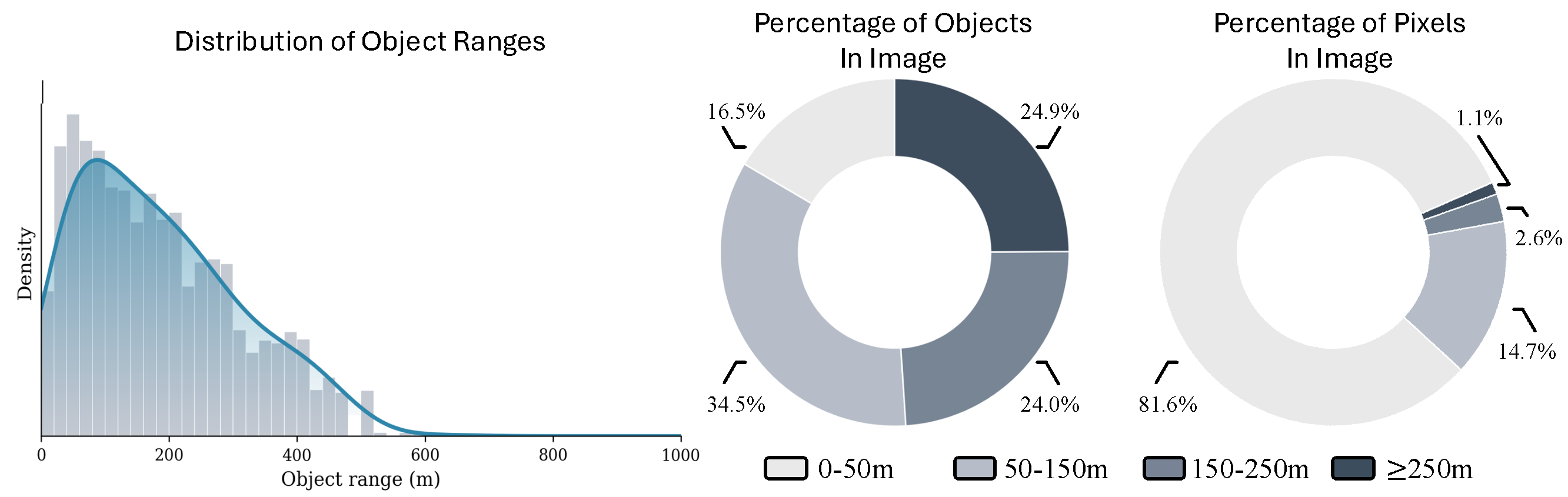
Autonomous highway driving requires reliable detection of objects beyond 500 meters to ensure safe braking at high speeds. At these distances, objects occupy only a few pixels in camera images, causing conventional detectors to fail, while LiDAR systems lack sufficient range due to resolution loss with distance. We introduce Telescope, a two-stage detection model tailored for ultra-long-range perception, featuring a novel resampling layer and image transformation to enhance small-object detection. Telescope delivers a 76% relative improvement in mAP over state-of-the-art methods at extreme ranges, with minimal computational overhead and strong performance across all distances.
Detection with Hyperbolic Foeveation
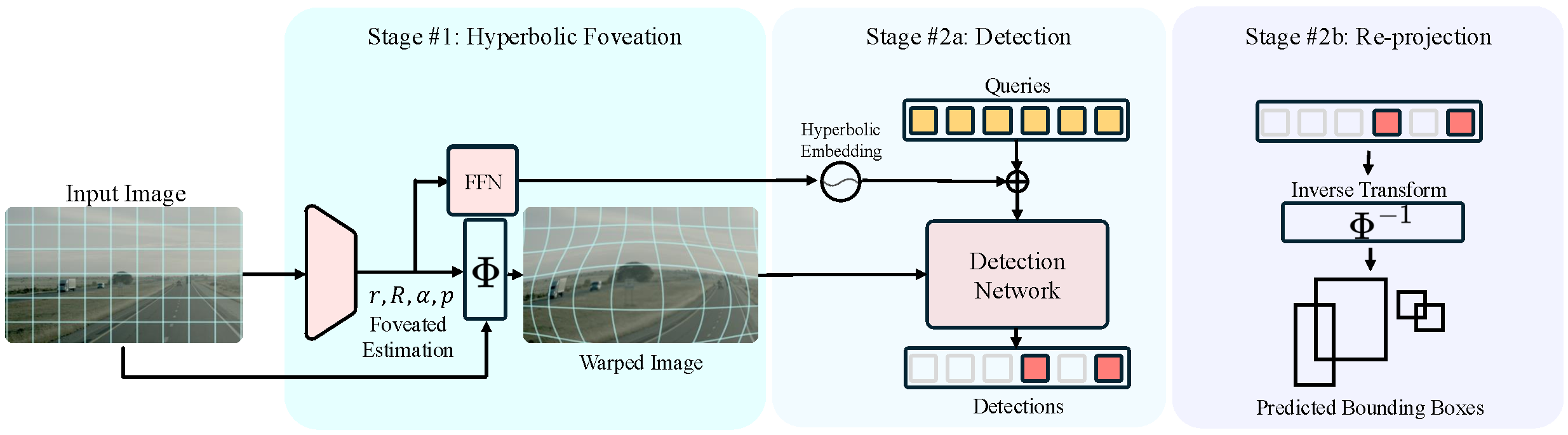
Telescope is a two-stage detection framework designed to improve long-range perception by explicitly addressing extreme scale
imbalance in images. In the first stage, a lightweight network predicts a learnable hyperbolic foveation transform from a
low-resolution image, which magnifies distant regions while compressing nearby ones—effectively normalizing object scales
with minimal compute overhead.
In the second stage, this transformation is applied to the full-resolution image and processed by a high-resolution detection
pipeline built on a pre-trained foundation encoder and a Deformable DETR head. Objects are detected in the transformed (Riemannian)
space using a novel bounding box parameterization, then mapped back to the original image.
This design enables efficient high-resolution processing, improves sensitivity to small distant objects, and maintains strong
performance across all ranges without incurring the quadratic cost of standard attention mechanisms.
Interactive Hyperbolic Foveation
An interactive demo of the hyperbolic foveation transform presented in the paper. The α parameter controls the hyperbolic strength, and the p parameter controls the transition sharpness. All other parameters are fixed those used in the paper.
Foveation Demo

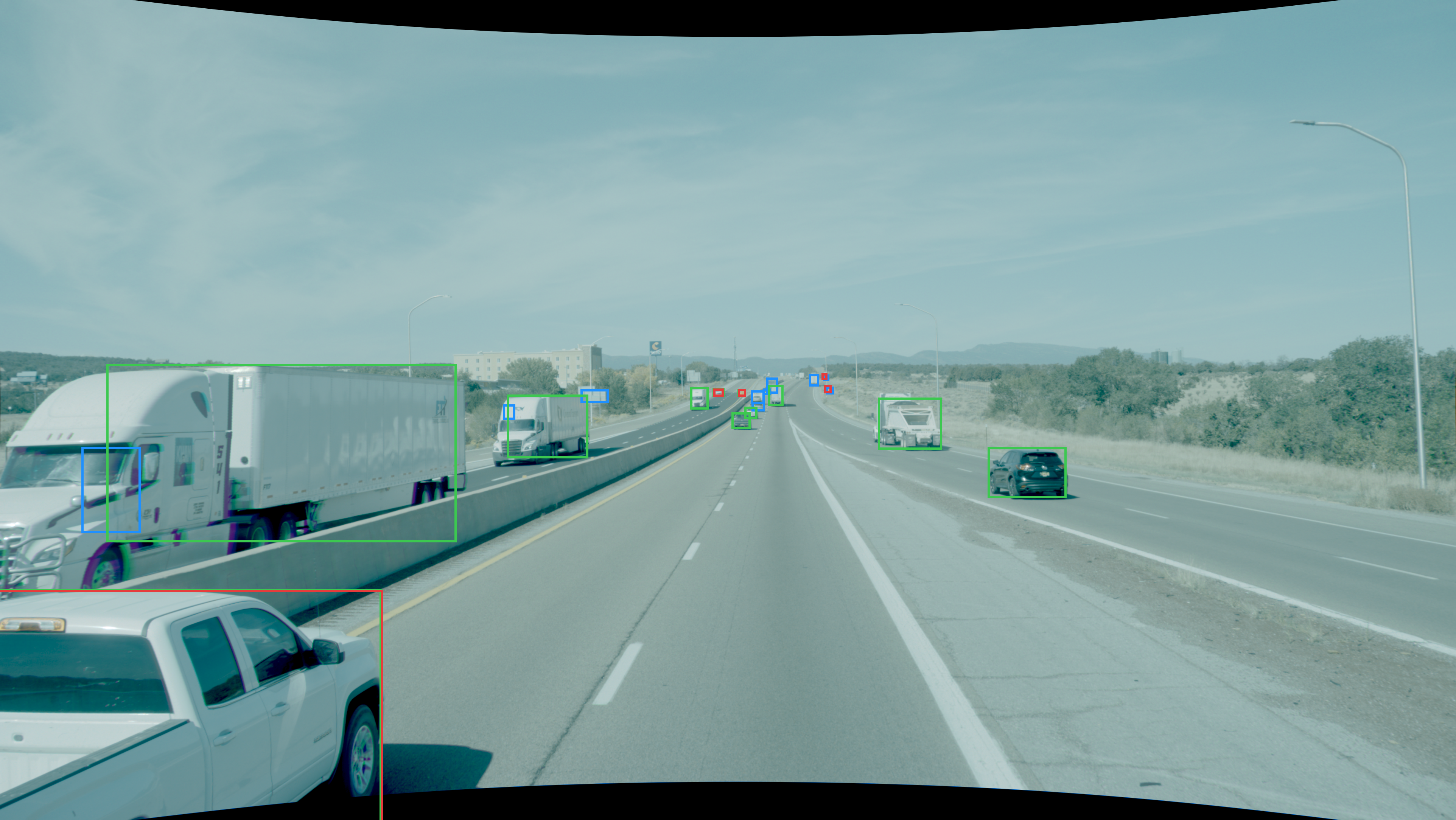
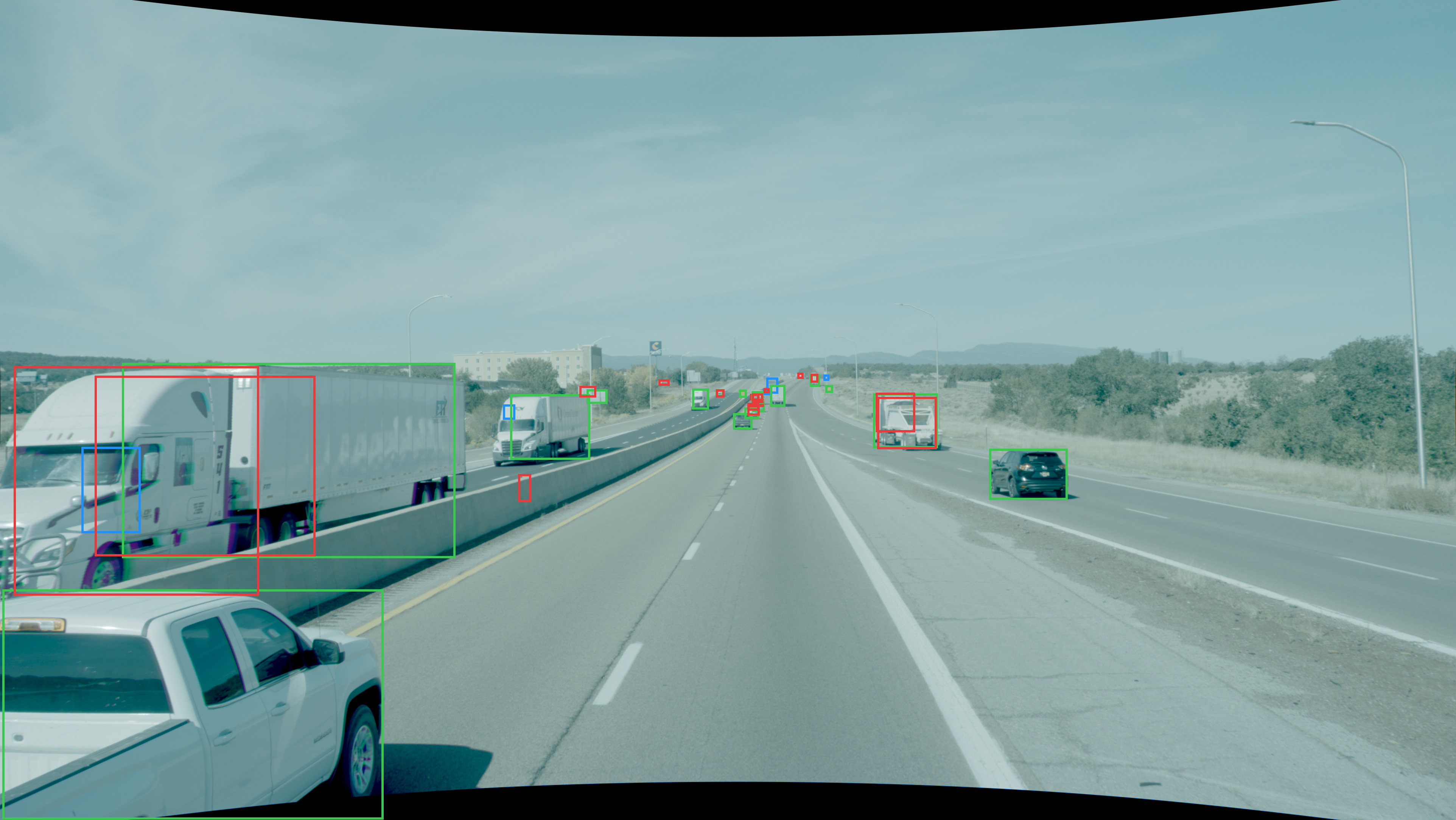
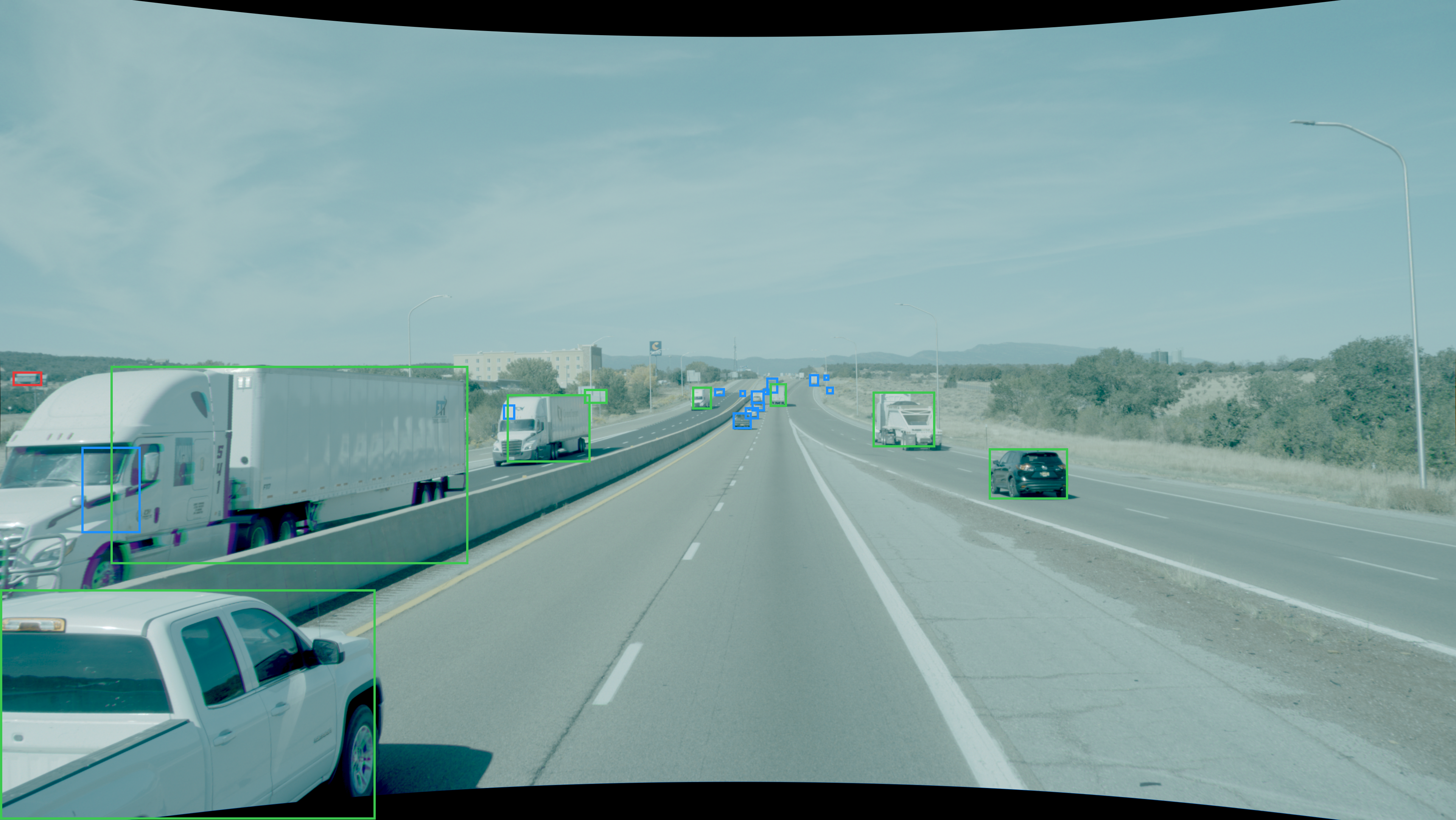
Qualitative Comparisons
Detections from Telescope (left) are compared versus each baseline (right). Green indicates correct detections, red indicates incorrect detections, and blue indicates missed detections. Telescope improved detections across all ranges compared to existing baselines.
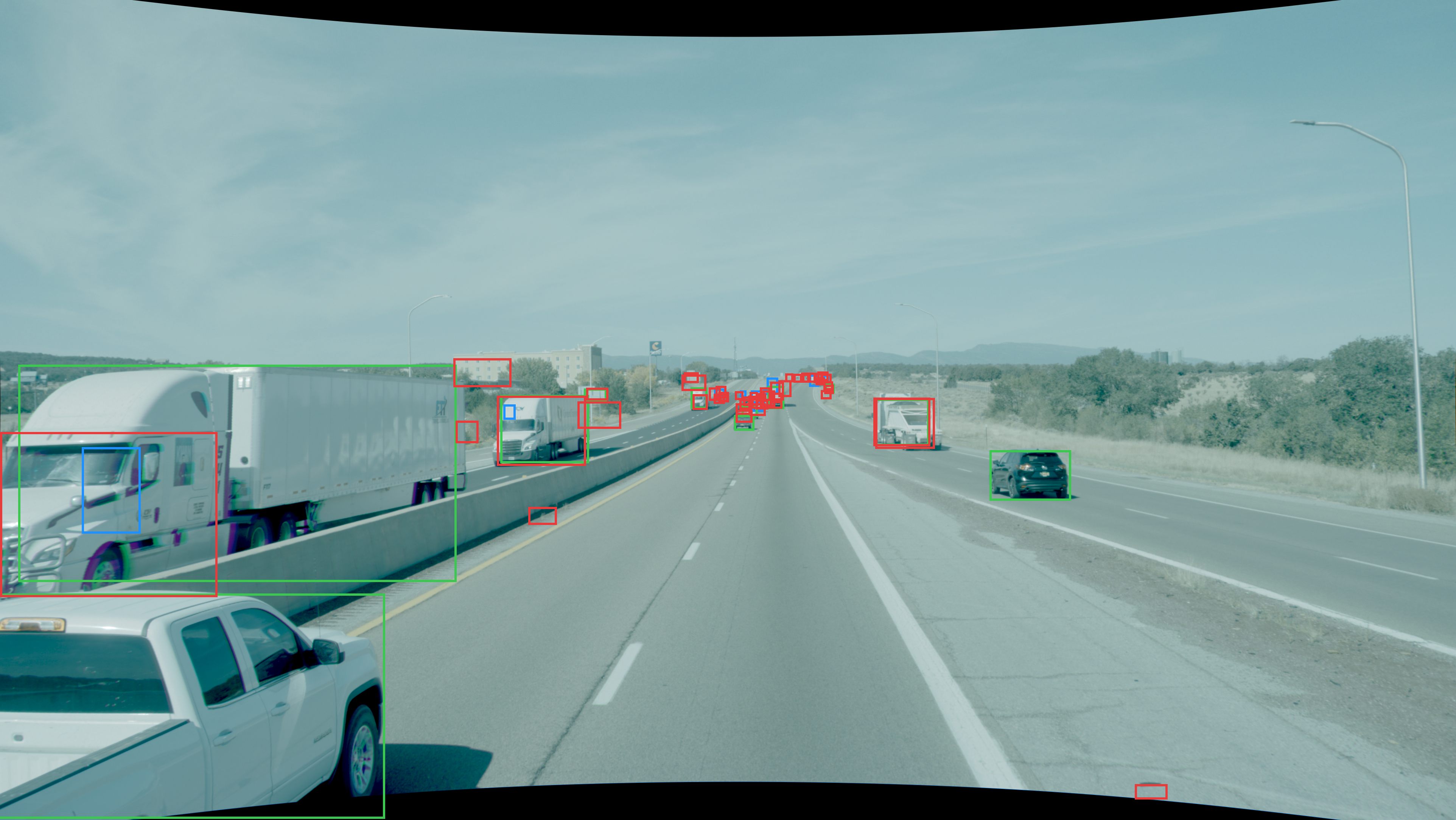
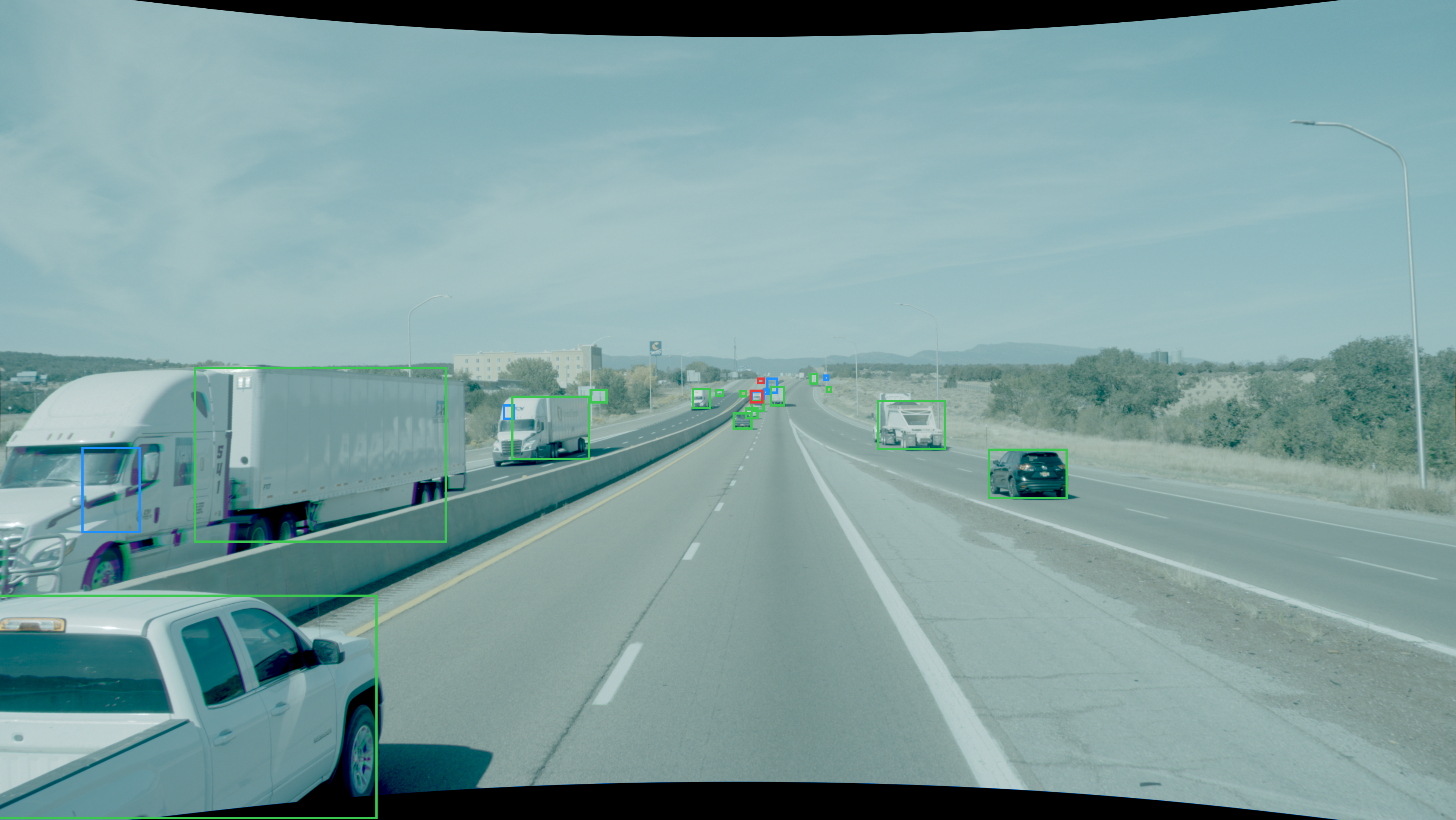
Telescope achieves state-of-the-art performance on ultra-long-range object detection benchmarks,
with particularly strong gains at distances beyond 250 meters. On the TruckDrive dataset, it
delivers up to a 76% relative improvement in mAP over prior methods at ultra-long ranges, while also
significantly boosting overall detection performance.
These results demonstrate that explicitly rebalancing object scale through hyperbolic foveation, which
only incurs minimal computational overhead, is a highly effective strategy for long-range perception
in autonomous driving.
BibTeX
@article{ewen2026telescope,
title = {Telescope: Learnable Hyperbolic Foveation for Ultra-Long-Range Object Detection},
author = {Parker Ewen and Dmitriy Rivkin and Mario Bijelic and Felix Heide},
journal = {arXiv preprint arXiv:0000.00000 (LINK TO COME)},
year = {2026}
}